
En el controlador PLCopen, el sistema de coordenadas es el punto de referencia para definir los seis grados de libertad (DOF). Los ingenieros deben comprender cómo interactúan los diferentes sistemas de coordenadas y qué marcos son importantes para la comprensión.
Comprender las diferencias entre los sistemas de coordenadas y cómo interactúan entre sí es clave para lograr un control de movimiento exitoso usando grupos. En la Parte 4 de PLCopen, el estándar global para el control de movimiento del controlador programable IEC6111-3, se presenta el concepto de movimiento coordinado multieje mediante grupos. Un grupo es una colección de ejes que trabajan juntos según un mecanismo común para proporcionar una trayectoria de movimiento en tres dimensiones. Los ejemplos incluyen sistemas de pórtico, robots de brazo articulado, robots triangulares o mecanismos de conexión; Múltiples ejes trabajan juntos para lograr un movimiento multidimensional del dispositivo.
Como parte de la nueva funcionalidad, el concepto de sistemas de coordenadas en los controladores se ha convertido en un tema importante de comprensión. El sistema de coordenadas es el punto de referencia que define los seis grados de libertad (DOF): X, Y y Z para coordenadas cartesianas, y los ángulos Rx, Ru y Rz que describen el grado de rotación de cada eje (llamados ángulos de Euler) .
Cada mecanismo, componente o unidad de trabajo bajo control tiene su propio sistema de coordenadas. Dado que el controlador PLCopen puede controlar varios grupos, cada uno de los cuales trabaja en varias piezas, es importante que el programador comprenda cómo interactúan los diferentes sistemas de coordenadas.
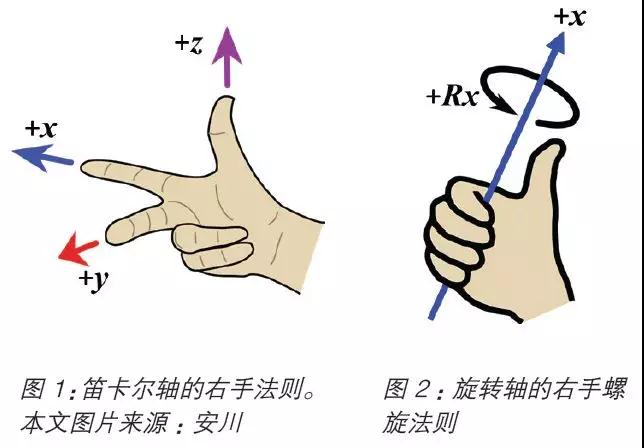
Cada sistema de coordenadas tiene un origen, que se utiliza para definir el punto cero en todas las coordenadas. La dirección de cada eje está determinada por la regla de la mano derecha (ver Figura 1). Si el dedo índice apunta en la dirección positiva de X, el dedo medio extendido (en ángulo recto con el dedo índice) apunta en la dirección positiva de Y, y el pulgar extendido apunta en la dirección positiva de Z.
La dirección del ángulo se determina usando la regla de la espiral de la mano derecha (ver Figura 2). El pulgar apunta en la dirección positiva del eje y el dedo se dobla alrededor del eje en la dirección de rotación positiva del eje.
Posición del motor
Finalmente, el controlador controla la posición de los motores individuales. Cada eje del grupo tiene su propio sistema de coordenadas de eje (ACS), que es la posición de rotación del motor. Para la mayoría de los mecanismos complejos, como los robots de brazo articulado, los robots de triangulación y los mecanismos de conexión, la posición de un sistema de coordenadas de un solo eje no significa que se haga algo solo; Es a través de la coordinación de estos ejes que se determina la posición de la maquinaria mediante cálculos cinemáticos. Estos cálculos se pueden realizar dentro del controlador o mediante un controlador de robot independiente.
El sistema de coordenadas básico para cada grupo es el sistema de coordenadas de la máquina (MCS). El fabricante de la máquina define la fuente del sistema de coordenadas de la máquina. Para robots de brazo articulado y robots triangulares, normalmente se encuentra en la base del robot. Luego, el controlador realiza cálculos cinemáticos para determinar el sistema de coordenadas de la tabla de herramientas (TPCS), que es el punto final de la propia máquina. Este sistema de coordenadas en sí no es útil para el programador, pero puede usarse para definir el origen de la ubicación de la herramienta. La cuchilla tiene su propio sistema de coordenadas, a saber, el sistema de coordenadas de la herramienta (TCS).
Comando de posición
Por lo general, la herramienta se centra al final de la máquina, por lo que esto puede ser tan simple como un desplazamiento en la dirección positiva Z del sistema de coordenadas de la tabla de herramientas, y también puede requerir un componente Rz para tener en cuenta la rotación. El sistema de coordenadas de la herramienta se usa más comúnmente para posiciones de aprendizaje y movimiento lento, pero no se usa con frecuencia en el movimiento automático. El origen del sistema de coordenadas de la herramienta es el punto central de la herramienta (TCP), que es el punto de inicio del desplazamiento del comando. Cuando se invoca un cambio en el sistema de coordenadas de la máquina, es el punto central de la herramienta el que se mueve a esa posición (consulte la Figura 3).

Dado que cada grupo tiene su propio origen del sistema de coordenadas de la máquina, mover varios grupos a la misma posición en el espacio requiere que cada grupo tenga su propia instrucción de posición en relación con la posición del sistema de coordenadas de la máquina. Por ejemplo, si dos robots de recolección recogen artículos del mismo transportador, cada uno de ellos se mueve a la misma posición en la cinta transportadora, se requieren diferentes instrucciones de posición del sistema de coordenadas de la máquina.
Para simplificar el desplazamiento en espacios compartidos similares, el origen del sistema de coordenadas de la máquina para cada grupo se puede obtener a partir del origen del sistema de coordenadas universal (WCS), más el desplazamiento. Cada unidad de trabajo tiene solo una fuente del sistema de coordenadas mundial. Cuando configura un solo grupo, necesita definir un desplazamiento al origen del sistema de coordenadas universales. Esto permite que varias agencias utilicen un sistema de coordenadas común para simplificar la programación.
El último sistema de coordenadas a considerar es el sistema de coordenadas de componentes (PCS). Este sistema de coordenadas se utiliza para definir la posición y orientación de cada objeto en el espacio mundial. El origen de este sistema de coordenadas se encuentra en la pieza y se mueve con la pieza. Esto es útil cuando se opera en piezas individuales, como en una aplicación de recoger y colocar. Otras aplicaciones incluyen el seguimiento del transportador, en el que los componentes se mueven a lo largo de una cinta transportadora. En este caso, el sistema de coordenadas del componente se mueve en relación con el origen del sistema de coordenadas universales y el sistema de coordenadas de la máquina, por lo que mover el punto central de la herramienta de la máquina a una posición específica del sistema de coordenadas del componente debe tener en cuenta el cambio de compensación entre los diferentes sistemas de coordenadas (ver Figura 4).

Comprender las diferencias entre los sistemas de coordenadas y cómo interactúan entre sí es clave para el control de movimiento exitoso usando grupos en IEC. Diferentes sistemas de coordenadas trabajan juntos para lograr la operación deseada.
Ejemplo de seguimiento de cinta transportadora
En una aplicación de seguimiento de cinta transportadora, el primer comando puede ser mover el punto central de la herramienta en el sistema de coordenadas de la máquina para ubicar el punto central de la herramienta en la posición inicial del área de seguimiento. Se definen la posición y la orientación de la pieza, y la rutina de seguimiento del transmisor calcula el desplazamiento de la pieza al origen del sistema de coordenadas del mecanismo de la máquina. Este desplazamiento define el sistema de coordenadas del componente de la pieza y la relación entre el sistema de coordenadas de la máquina y la función de seguimiento del transportador. El desplazamiento del sistema de coordenadas del componente se ajusta a medida que se mueve la pieza. Luego, el usuario define un movimiento en el espacio del sistema de coordenadas de la pieza para recoger la pieza. Dado que el desplazamiento del sistema de coordenadas del componente tiene 6 grados de libertad, también se puede lograr abrir la caja en la cinta transportadora si es necesario. Luego, el usuario realiza un desplazamiento en el espacio del sistema de coordenadas de la pieza para recoger la pieza.
La orientación de la herramienta se adapta automáticamente a la pieza (si es necesario) y el desplazamiento entre los sistemas de coordenadas ha tenido en cuenta estos factores. Se utiliza la misma posición del sistema de coordenadas de la pieza para cada recogida, y el desplazamiento del sistema de coordenadas de la pieza cambia solo cuando se encuentra una pieza nueva. Dado que la función de seguimiento de la cinta transportadora actualiza constantemente el desplazamiento del sistema de coordenadas del componente, el punto central de la herramienta también se rastrea a lo largo de la dirección positiva de la cinta transportadora para resolver el problema del movimiento del componente.